

[汽車之家 新鮮技術解讀] 2021年10月23日,首屆廣汽本田安全中國行?第二屆道路安全創新大賽在廣州展開。行業專家、媒體以及12個高校代表隊參加了這次大賽,以多維度視角來討論移動互聯網時代道路交通安全問題的解決之道。


吉林大學-萬丈高樓平地起團隊、吉林大學-燈桿小隊(左&中)、哈爾濱工業大學(威海)-模數師隊(右),共3支參賽隊伍榮獲一等獎。下面我們就一起來了解下本次參賽的12個隊伍帶來的作品,看看他們的設計是如何提升道路交通安全的。

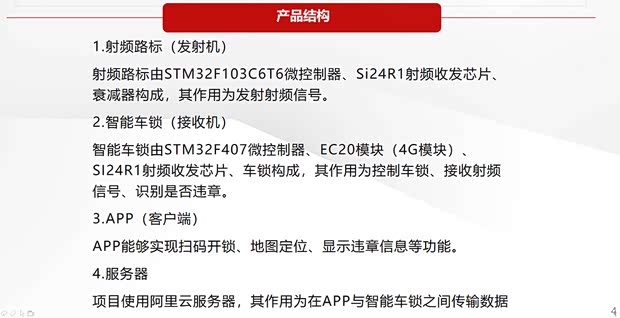
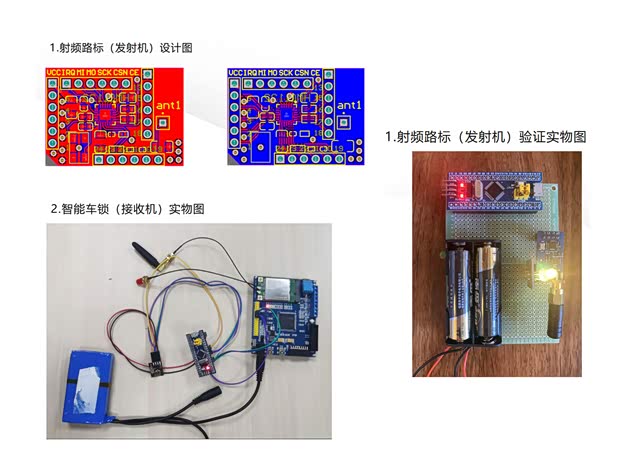
來自哈爾濱工業大學(威海)的模數師團隊部設計了“射頻路標及智能電動車鎖”。通過在共享電動自行車鎖內安裝低成本射頻接收器,在路口信號燈柱內安裝射頻發射器,實現對電動車是否超速或是否違反交通燈號進行檢測。檢測到的數據會通過無線網絡上傳至服務器,可為交警部門和共享車輛平臺提供違章處罰依據。該方案已經進入到實際測試階段,低成本的特點有利于其得到快速推廣。


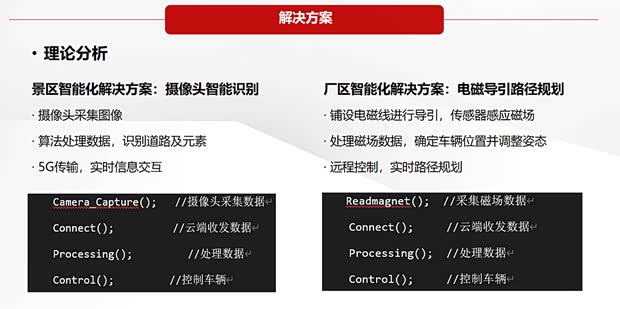
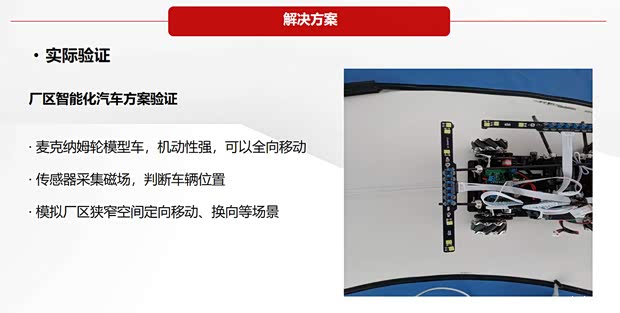

哈爾濱工業大學(威海)的汽智卓越隊設計了特定道路使用的自動駕駛車輛。這些車輛包括利用攝像頭進行環境識別的景區自動駕駛車輛以及利用電磁引導路徑規劃的廠區自動駕駛車輛。該項目的理念已經在小型模型車上得到初步驗證。不過技術要應用在實際道路上還需進一步在技術上進行打磨和完善。

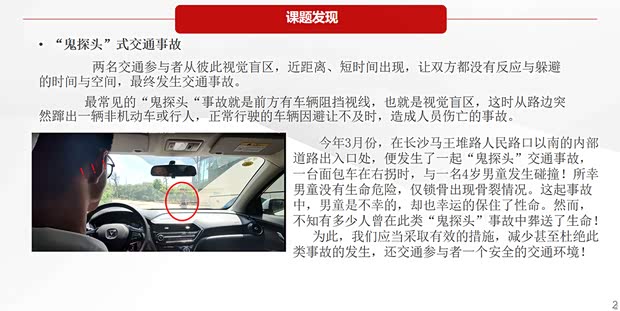
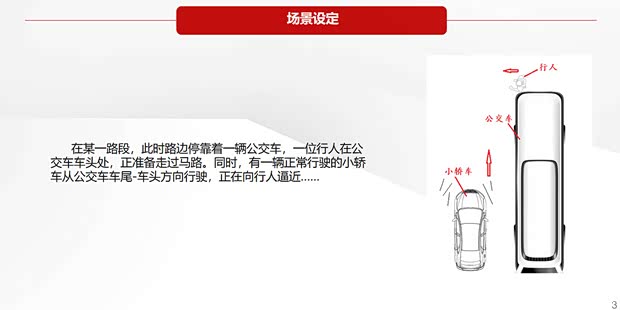
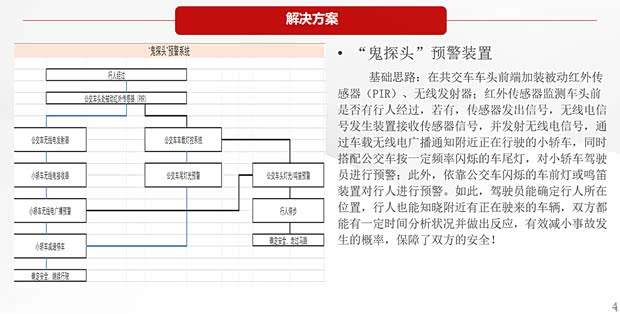
由于公交車車身較高,所以行人從靜止公交車車頭橫穿時就會創造出一個鬼探頭的情況。湖南大學的蘇隊設計的是一個安裝在公交車上的鬼探頭預警裝置。這個裝置在公交車頭安裝被動紅外線傳感器來檢測前方的行人。如果有行人從車前經過,公交車會閃爍前大燈或者鳴笛來對行人進行警示,通過閃爍尾燈來警示后方來車,同時會通過無線電廣播通知附近行駛車輛,進行聯動報警提醒。該方案目前處于概念階段,但簡單實用的系統設計和低廉的成本將有利于其推廣。

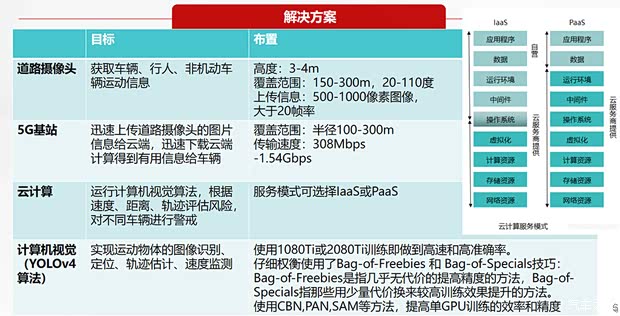

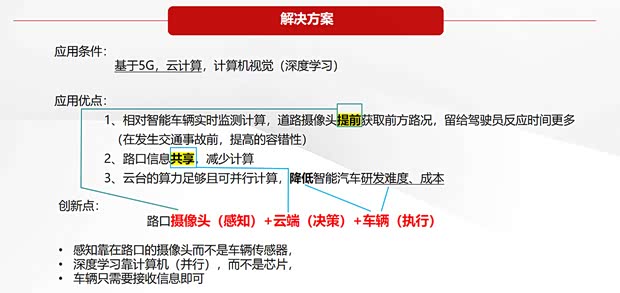
湖南大學咸魚隊的理念是在十字路口布置攝像頭系統來捕捉路口實時交通情況,通過5G低時延網絡傳送到云端服務器進行圖像識別、目標定位、軌跡估計以及速度檢測等。決策結果會回傳到車輛提醒駕駛員避讓兩輪車和行人。目前該項目處于概念階段,不過整體思路與目前業內主流的V2X理念相一致。

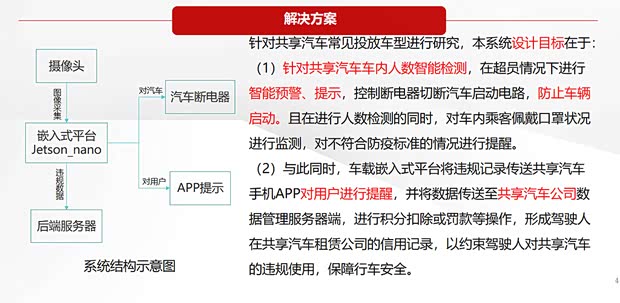

吉林大學萬丈高樓平地起團隊設計了一套共享汽車超載檢測系統。該系統的思路是通過攝像頭獲取車內影像,利用神經網絡算法來識別車內人員數量,在在超員情況下進行智能預警、提示,防止車輛啟動。超載違規記錄會共享到服務器,通過手機APP提醒用戶,同時共享汽車公司根據違規數據對用戶積分進行扣除或罰款等操作,以促進駕駛人規范用車,保障出行安全。該系統利用了英偉達主流的Jetson Nano硬件平臺,搭配最新的YOLO V5算法,項目已進入測試階段。

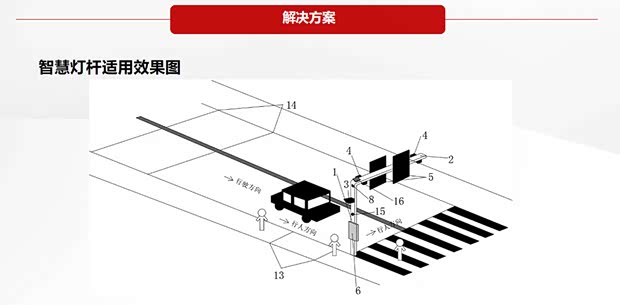

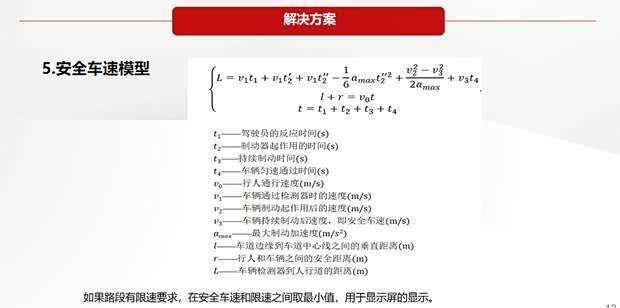
吉林大學燈桿小隊設計了一個智慧燈桿,燈桿上帶有攝像頭、顯示屏、控制器以及微處理器。通過攝像頭獲取無信號燈交叉口行人與車輛的影像,計算行人和車輛碰撞的概率,概率超過閾值會在智慧燈桿顯示屏幕上顯示警示信號,提醒駕駛員減速或者注意。該項目推導出了一個避免車輛與過街行人發生碰撞的安全車速模型。目前該項目已完成理論驗證。

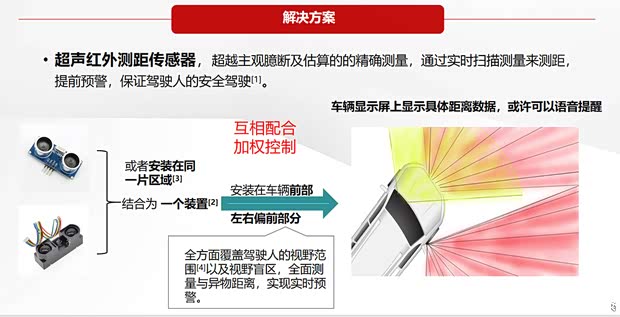
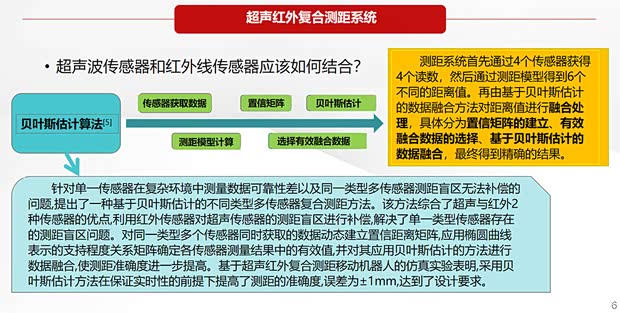

天津大學巧奪天工隊利用超聲波傳感器和紅外線傳感器進行融合,縮小測距盲區,輔助駕駛員識別視野盲區的情況。該項目的理念是在車頭和車側均設置上述傳感器來進行盲區監測。算法上采用了貝葉斯估計算法來獲得精確結果,利用BP神經網絡來實現溫度補償。該項目處于概念階段,在對環境依賴性上相比360度全景影像系統更好,成本比激光雷達更低。

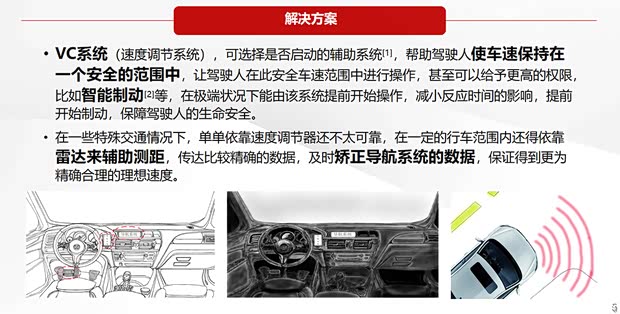
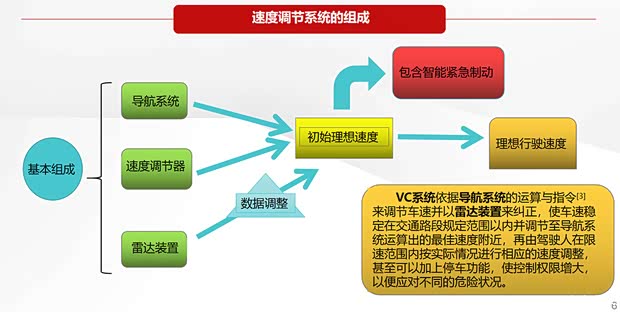
天津大學必勝隊設計了一個車速調節系統,將車速穩定在交通路段規定范圍以內并調節至導航系統運算出的最佳速度附近。該系統包括速度調節器、改進的導航系統以及激光雷達。該系統目前處于概念階段。實際上同樣的功能已經在一些目前主流的L2級別駕駛輔助系統上出現了。

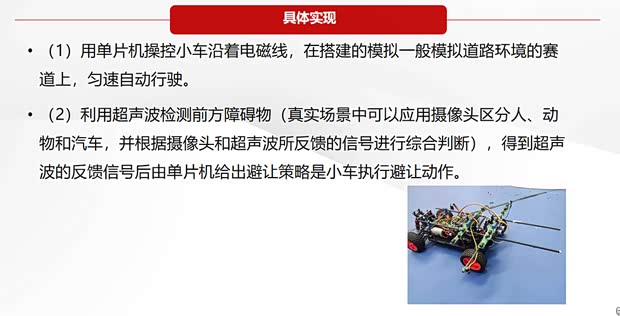

同濟大學逮蝦虎隊設計了一款超聲波探測的自動避障車輛。該車輛利用超聲波檢測前方障礙物然后進行避讓。該項目在小型電磁尋跡模型車上進行了測試,小車能夠避開障礙物,然后自動尋找新的路徑。該項目后續還會引入攝像頭來區分障礙物類型,判斷障礙物位置,然后再與超聲波傳感器的數據進行融合。該設計要實現真實車輛的自動避障操作可能有些難度,但用來實現盲區預警可能會比較現實。

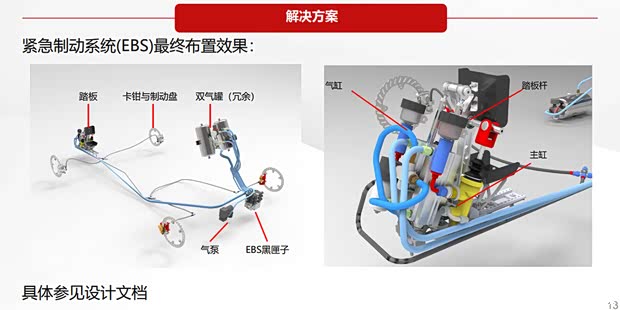
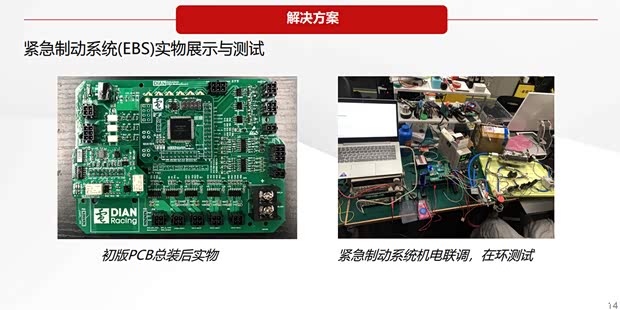

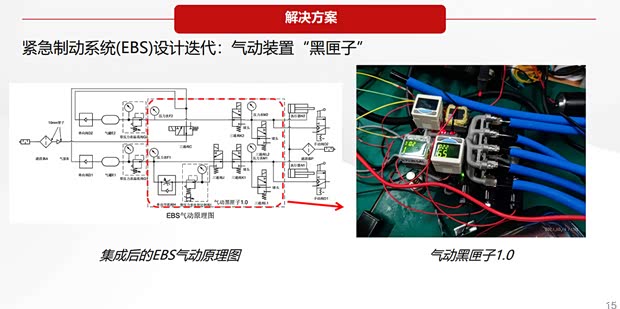
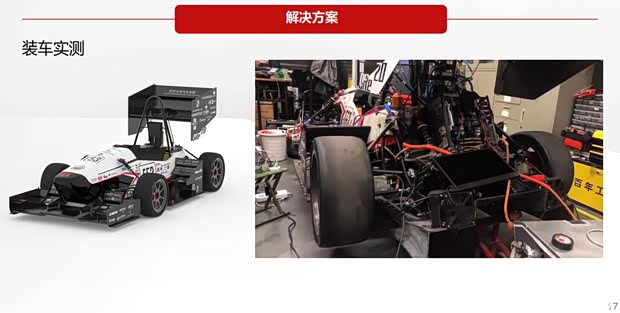
同濟大學DIAN Driverless線控制動小組設計了一套帶有冗余機制的緊急制動系統。這套系統在最小化原電動車改動的情況下,為車輛增加了一套氣動制動裝置。該系統制動裝置在車輛發生事故觸發高壓自動斷電保護時,能夠控制氣動系統代替駕駛員踩下制動踏板完成緊急制動。該項目已經完成基礎軟硬件設計并已經安裝到FSEC賽車上進行測試。整套系統無論在機械部件設計、電子電路設計以及控制軟件設計上都是可圈可點的,充分展現出同濟大學在汽車學術領域的造詣。




武漢理工大學的明天爭取不熬夜隊設計了一個基于駕駛行為習慣及車況數據采集的一體化駕駛安全監控平臺。對收集到的車輛運行狀態數據以及駕駛人員駕駛行為進行大數據分析,可以避免因車輛存在故障隱患、駕駛員有不良駕駛習慣等而引起的交通事故,同時也可以實現實時報警、實時救援等功能,減輕交通事故造成的傷害。實際上,相同概念的產品目前在手機導航上已經有出現。當你使用手機導航完成一次導航后,軟件會給你一個評分,這實際上就是大數據分析的結果。



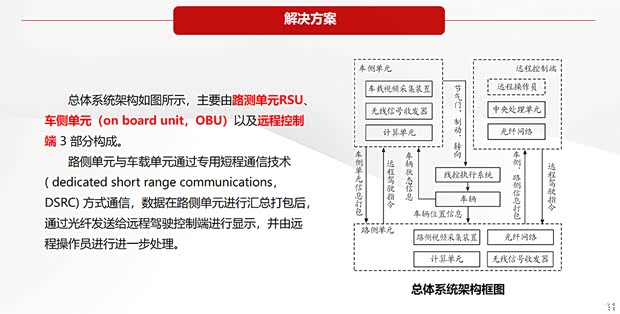

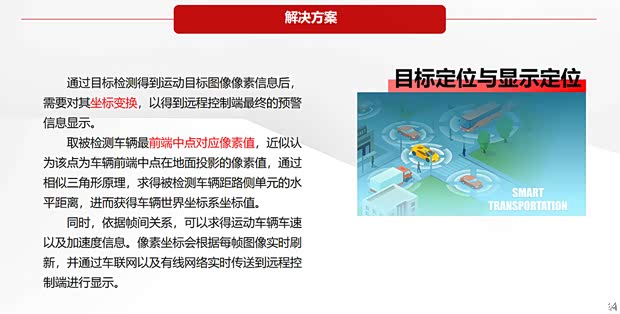
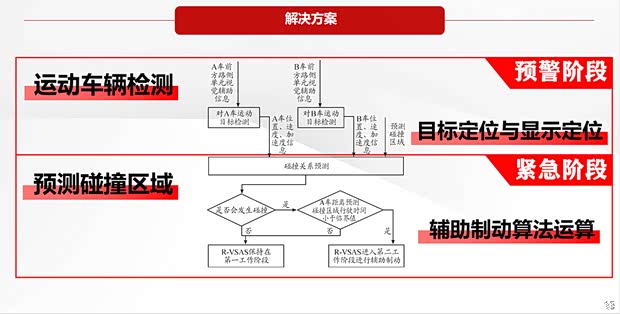
武漢理工大學的武理WUT團隊設計了一個基于路側單元視覺輔助的安全預警和智能制動系統。這套系統主要是為自動駕駛車輛的遠程安全員而設計的。其背景是,未來自動駕駛車輛數量增加,為每一輛自動駕駛車輛配一個安全員成本太高。一人管多車的遠程安全員就應運而生。遠程安全員通過VR設備來“幫助”需要緊急接管的自動駕駛車輛。該設計通過在路旁增加攝像頭來獲取路口的交通情況,當自動駕駛車輛四周存在較大視野盲區時,路側單元的攝像頭利用“上帝視覺”獲取的數據能夠實現盲區填補功能,這樣遠程駕駛員通過VR設備就能夠實現看穿障礙物的視覺效果,從而有利于作出正確的控制決策。當然,該系統也能用于非自動駕駛車輛,同樣能起到盲區預警的效果。該設計目前處于概念階段,但想法還是非常有創新性的。

廣汽本田一直致力于道路安全建設,承擔企業的社會責任。2007年開展“安全中國行”活動、2019年建立廣汽本田 ?道路安全高校聯盟、2020年和今年的道路安全創新大賽都體現了廣汽本田對推廣道路安全理念的堅持。本屆道路安全創新大賽的不少作品有著非常好的創新性和實用性。這些作品中除了擁有優秀的機械、電子、程序設計方案外,還深度融合了5G網絡、人工智能、圖像識別、VR等前沿技術,充分展現了我國新一代大學生在科研上的眼界、創新與能力。產學研合作的深化將為未來中國汽車產業注入了新的活力。(圖/文/汽車之家 常慶林)
京ICP備09113703號-1
信息網絡傳播視聽節目許可證: 0110553
廣播電視節目制作經營許可證
公司名稱:北京車之家信息技術有限公司
中央網信辦違法和不良信息舉報中心
違法和不良信息舉報電話:400-868-5856
舉報郵箱:jubao@autohome.com.cn